Rika Antonova

Data-efficient exploration, transfer, and active learning
A Brief Bio
I am an Associate Professor at the University of Cambridge, leading the Cambridge Resilient Autonomous Learning (CamRAL) Lab. I am currently looking for talented mechanical engineers / postdocs for a project on novel robot hardware design. While my recent work focused on robotics, I am also returning to my long-term interest in reinforcement learning algorithms, so I am enthusiastic about collaborations in data-efficient RL, active learning & exploration, and decision-making for scientific & environmental domains as well. I am also teaching an RL course at Cambridge.
Previously, I was at Stanford University upon receiving the NSF/CRA Computing Innovation Fellowship, and worked with the Interactive Perception and Robot Learning Lab at Stanford led by Jeannette Bohg. I completed my PhD work on data-efficient simulation-to-reality transfer at KTH (Sweden) in the group led by Danica Kragic. I also had the opportunity to intern at NVIDIA Robotics (Seattle, USA) and Microsoft Research (Cambridge, UK).
Before that, I obtained my Master's degree from the Robotics Institute at Carnegie Mellon University, where I developed data-efficient methods for learning controllers for bipedal locomotion (with Akshara Rai and Chris Atkeson). During my time at CMU, my advisor was Emma Brunskill, and in her group I also worked on data-efficient reinforcement learning.
A few years earlier, I was a software engineer at Google, first in the Search Personalization group and then in the Character Recognition team (developing an open-source OCR engine Tesseract).
Stanford Robotics Center Opening Demos
We showcased novel sensing and multi-robot collaboration methods as part of the Stanford Robotics Center opening week: a lively event with 1000+ visitors and audience participation (as you can see in the highlights video).
Recent ICML, CoRL, ICRA, and IROS presentations
C Morlans, M Yi, C Chen, S Wu, R Antonova, T Gerstenberg, J Bohg. Causal-PIK: Causality-based Physical Reasoning with a Physics-Informed Kernel. International Conference on Machine Learning (ICML), 2025. [arXiv]
J Yang, I Huang, B Vu, M Bajracharya, R Antonova, JBohg. Mobi-pi: Mobilizing Your Robot Learning Policy. Conference on Robot Learning (CoRL), 2025. [arXiv]
C Agia, R Sinha, J Yang, R Antonova, M Pavone, H Nishimura, M Itkina, J Bohg. CUPID: Curating Data your Robot Loves with Influence Functions. Conference on Robot Learning (CoRL), 2025. [arXiv]
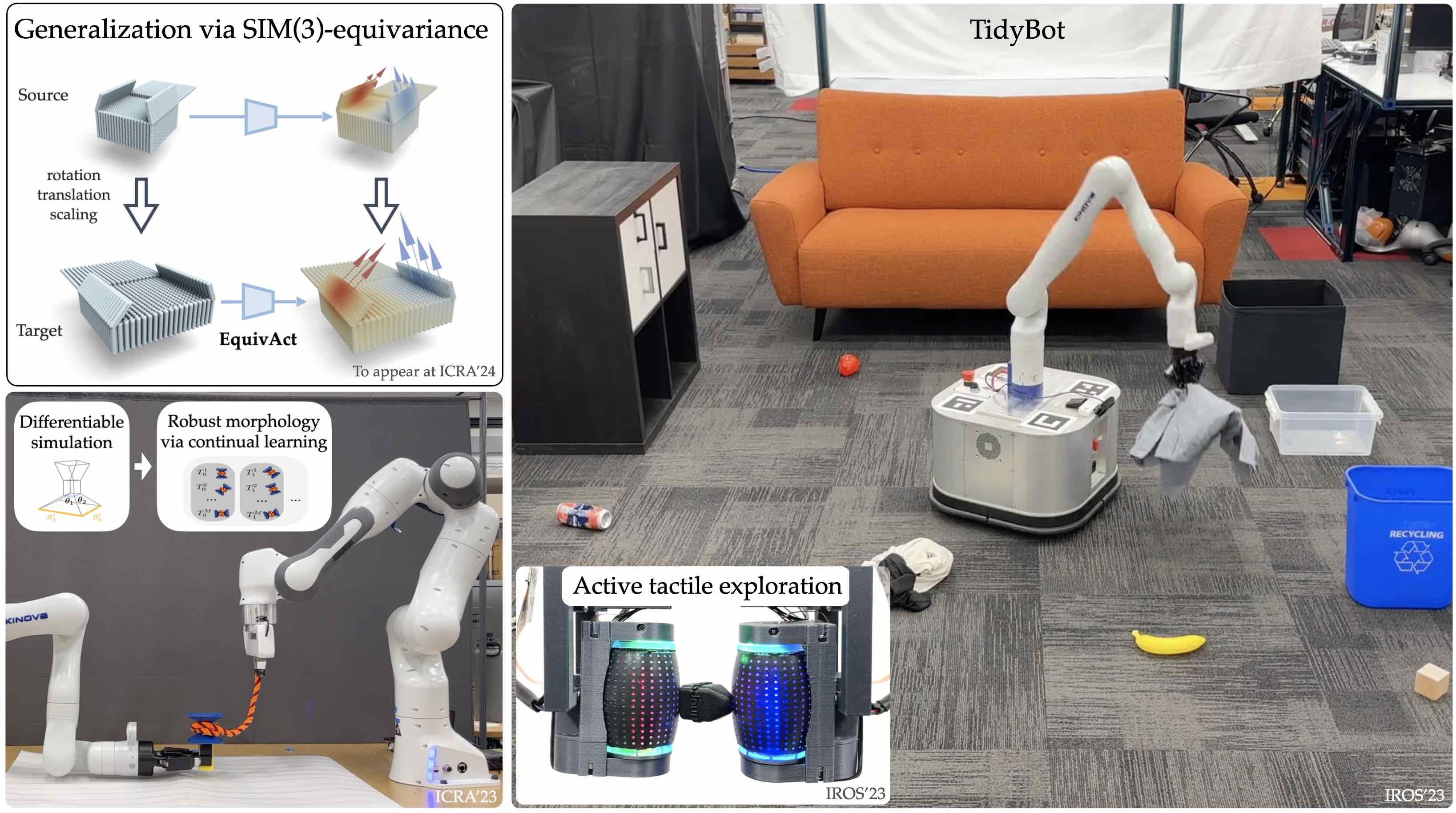
J Yang, Z Cao, C Deng, R Antonova, S Song, J Bohg. EquiBot: SIM(3)-Equivariant Diffusion Policy for Generalizable and Data Efficient Learning. Conference on Robot Learning (CoRL), 2024. [arXiv]
C Agia, R Sinha, J Yang, Z Cao, R Antonova, M Pavone, J Bohg. Unpacking Failure Modes of Generative Policies: Runtime Monitoring of Consistency and Progress. Conference on Robot Learning (CoRL), 2024. [arXiv]
J Yang, C Deng, J Wu, R Antonova, L Guibas, J Bohg. EquivAct: SIM(3)-Equivariant Visuomotor Policies beyond Rigid Object Manipulation. IEEE International Conference on Robotics and Automation (ICRA), 2024. [arXiv]
M Li, R Antonova, D Sadigh, J Bohg. Learning Tool Morphology for Contact-Rich Manipulation Tasks with Differentiable Simulation. IEEE International Conference on Robotics and Automation (ICRA), 2023.
J Wu, R Antonova, A Kan, M Lepert, A Zeng, S Song, J Bohg, S Rusinkiewicz, T Funkhouser. TidyBot: Personalized Robot Assistance with Large Language Models. IEEE International Conference on Intelligent Robots and Systems (IROS), 2023. Journal version published in Autonomous Robots, 2023.
C Pan, M Lepert, S Yuan, R Antonova, J Bohg. In-Hand Manipulation of Unknown Objects with Tactile Sensing for Insertion. IEEE International Conference on Intelligent Robots and Systems (IROS), 2023.
Research Community Involvement
Serving on the Board of Directors of the Robot Learning Foundation.
Associate Editor in Robot Learning for the IEEE International Conference on Robotics and Automation (ICRA), 2024.
Chair for Researcher Demos at the Conference on Robot Learning (CoRL), 2024.
Served on a review panel to evaluate NSF Robust Intelligence proposals, 2024.
Served on a review panel to evaluate NSF Foundational Research in Robotics proposals, 2022.
Part of the IEEE Robotics and Automation (RAS) Technical Committee on Robot Learning (2022-2024).
Part of the organizing committee for Learning for Dynamics and Control (L4DC) 2022 conference (with Mykel Kochenderfer, Jeannette Bohg, Negar Mehr, Mac Schwager, Roya Firoozi, and Esen Yel).
Program Committee Chair for RSS Pioneers 2021.
Organizer for several workshops at CoRL, RSS, ICRA, NeurIPS, and ICLR
Reviewer for JMLR, Nature - Machine Intelligence, Autonomous Robots Journal, RA-L, RSS, ICRA, AAMAS, L4DC, IROS, and CoRL.
Publications, Talks, Preprints
R Antonova *, J Yang *, K Jatavallabhula, J Bohg. Rethinking Optimization with Differentiable Simulation from a Global Perspective. Conference on Robot Learning (CoRL), 2022. Selected for oral presentation (6.5% acceptance rate).
R. Antonova, J. Yang, P. Sundaresan, D. Fox, F. Ramos, J. Bohg. A Bayesian Treatment of Real-to-Sim for Deformable Object Manipulation. IEEE Robotics and Automation Letters (RA-L), 2022. [arXiv]
P Sundaresan, R Antonova, J Bohg. DiffCloud: Real-to-Sim from Point Clouds with Differentiable Simulation and Rendering of Deformable Objects. IEEE International Conference on Intelligent Robots and Systems (IROS), 2022.
J Yang, J Zhang, C Settle, A Rai, R Antonova, J Bohg. Learning Periodic Tasks from Human Demonstrations. IEEE International Conference on Robotics and Automation (ICRA), 2022.
R. Antonova *, P. Shi *, H. Yin, Z. Weng, D. Kragic. Dynamic Environments with Deformable Objects. Neural Information Processing Systems (NeurIPS), Datasets and Benchmarks Track, 2021.
R. Antonova, F. Ramos, R. Possas, D. Fox. BayesSimIG: Scalable Parameter Inference for Adaptive Domain Randomization with IsaacGym, arXiv:2107.04527, 2021. This open source framework was presented as part of the full-day tutorial on End-to-end GPU-accelerated Learning and Control for Robotics with Isaac Gym at RSS, 2021. [Video]
R. Antonova *, A. Varava *, P. Shi, J. Carvalho, D. Kragic. Sequential Topological Representations for Predictive Models of Deformable Objects. In Proceedings of Machine Learning Research as part of the conference on Learning for Dynamics and Control (L4DC), 2021.
R. Antonova, M. Maydanskiy, D. Kragic, S. Devlin, K. Hofmann. Analytic Manifold Learning: Unifying and Evaluating Representations for Continuous Control. Presented at the Conference on Mathematical Theory of Deep Neural Networks (DeepMath), 2020.
M. Hwasser, D. Kragic, R. Antonova. Variational Auto-Regularized Alignment for Sim-to-Real Control. IEEE International Conference on Robotics and Automation (ICRA), 2020.
| ICRA2020 Talk | ICRA2020 Experiments Video |
|---|---|
|

|
R. Antonova *, A. Rai *, T. Li, D. Kragic. Bayesian Optimization in Variational Latent Spaces with Dynamic Compression. Conference on Robot Learning (CoRL), PMLR 100: 456-465, 2019
| CoRL2019 Talk | CoRL2019 Experiments Video |
|---|---|
|

|
R. Antonova *, M. Kokic *, JA Stork, D. Kragic. Global Search with Bernoulli Alternation Kernel for Task-Oriented Grasping Informed by Simulation. Conference on Robot Learning (CoRL), PMLR 87: 641-650, 2018. Selected for oral presentation (7.5% acceptance rate).

A. Rai *, R. Antonova *, F. Meier, C. Atkeson. Using Simulation to Improve Sample Efficiency of Bayesian Optimization for Bipedal Robots. Journal of Machine Learning Research (JMLR) Bayesian Optimization Issue, (49): 1-24, 2019.
A. Rai *, R. Antonova *, S. Song, W. Martin, H. Geyer, C. Atkeson. Bayesian Optimization Using Domain Knowledge on the ATRIAS Biped. IEEE International Conference on Robotics and Automation (ICRA), 2018 [arXiv, poster]
R. Antonova *, A. Rai *, C. Atkeson. Deep Kernels for Optimizing Locomotion Controllers . Conference on Robot Learning (CoRL), PMLR 78: 47-56, 2017. [arXiv, poster]
R. Antonova *, A. Rai *, C. Atkeson. Sample Efficient Optimization for Learning Controllers for Bipedal Locomotion . IEEE-RAS 16th International Conference on Humanoid Robots (Humanoids), 2016. [arXiv]
| ICRA2018 Talk | CoRL2017 Talk |
|---|---|

|

|
R. Antonova *, S. Cruciani *. Unlocking the Potential of Simulators: Design with RL in Mind. Presented at the Multidisciplinary Conference on Reinforcement Learning and Decision Making (RLDM), 2017. [arXiv, poster]
R. Antonova. Bayesian Optimization for Policy Search: Case Studies in Robotics and Education . Masters thesis. Robotics Institute, Carnegie Mellon University, 2016.
R. Antonova, J. Runde, M. H. Lee, E. Brunskill. Automatically Learning to Teach to the Learning Objectives. In Proceedings of ACM Conference on Learning @ Scale, 2016. [poster]
R. Antonova, J. Runde, C. Dann, E. Brunskill. Improving the Sample Efficiency of Bayesian Optimization Policy Search for Optimal Stopping Problems. Workshop on Data-Efficient Machine Learning at ICML, 2016. [workshop website]
R. Antonova. Multi-task Value of Information Planning for Sequential Multi-task Bandits. Technical Report. Robotics Institute, Carnegie Mellon University, 2016. [related WiML poster]
Blue Sky Ideas
R. Antonova, A. Handa. Robots Teaching Humans: A New Communication Paradigm via Reverse Teleoperation. International Conference on Autonomous Agents and Multiagent Systems (AAAMAS), 2022.
R. Antonova, J. Bohg. Learning to be Multimodal : Co-evolving Sensory Modalities and Sensor Properties. Conference on Robot Learning, PMLR 164:1782-1788, 2022.
Our Research in the News
 |
 |
 |